product
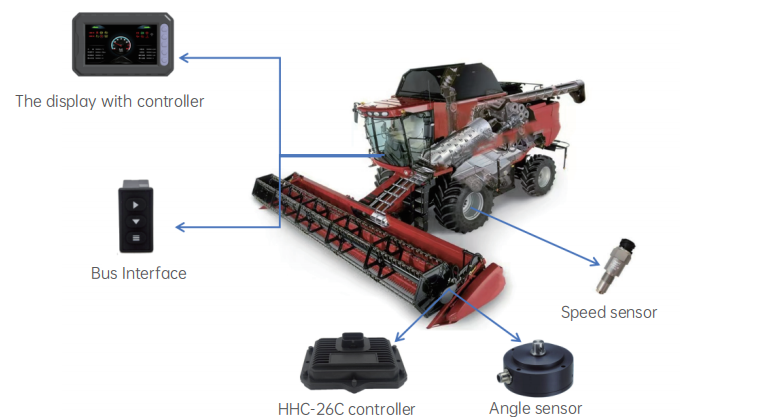
HHC-26C is a universal controller designed for mobile vehicles and engineering machinery control system.

Description
Characteristic
Technical Parameter
| Function | Parameter |
| Processor | 32 bits,72MHz |
| Program Space (FLASH) | 256KB |
| Data Space (RAM) | 64KB |
| Power-down save data space(FRAM) | 512B |
| Working voltage | 9V~32V |
| Continuous working current | 12A@24V |
| No-load current | 100mA@24V |
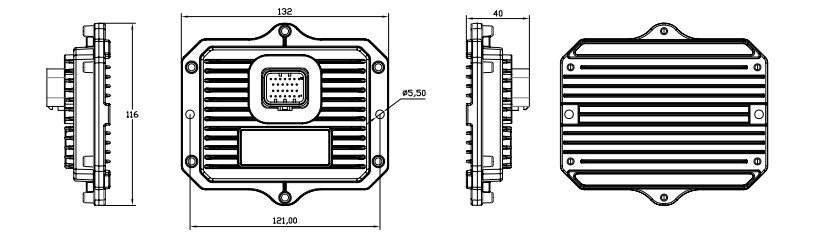
| Mechanical size (LxWxHmm) | 130*96*40 |
| Install | Secure through 2 mounting holes(05.5mm) |
| Linkage | 26 Needle plug-in |
| Weight | 307g |
| Working temperature | -40℃~+85℃ |
| Storage temperature | -40℃~+125℃ |
| Levels of protection | IP67 |
| Communicationdescrip tion of CAN nterface | 1 CAN interface,supporting CAN2.0B. 10 Kbits /s~1Mbits/s(default setting:250 Kbits /s) |
| Input/output | Up to 19 inputs (occupying all communication interfaces) Up to 12 outputs and total l0 up to 23 roads |
| Supporting electrical connection | TE Connectivity SUPER SEAL Series sheathes 3-1437290-8 Pin 3-1447221-3 |
| Install | Vertical installation,installation hole spacing 119mm,M4 flat head screw*2 |
Pin Definition
| Pin | Default setting | DI | Other | Description of pin definition |
| 1 | POWER+ | With the current feedback function | ||
| 2 | DO1 | None | PWM1 | |
| 3 | DO2 | PWM2 | ||
| 4 | DO3 | PWM3 | ||
| 5 | DO4 | PWM4 | ||
| 6 | DO5 | DI-01 | PWM5 | The DI input high level is valid |
| 7 | DO6 | DI-02 | PWM6 | |
| 13 | DO7 | DI-05 | PWM7 | |
| 19 | DO8 | Dl-108 | PWM8 | |
| 8 | DO9 | DI-03 | PWM9 | |
| 14 | DO10 | DI-06 | PWM10 | |
| 20 | DO11 | DI-07 | PWM11 | |
| 21 | DO12 | DI-08 | PWM12 | |
| 10 | 5Vout(200mA) | |||
| 15 | Al1 | DI-09 | ||
| 16 | Al2 | DI-10 | ||
| 17 | Al3 | DI-11 | ||
| 18 | Al4 | DI-12 | ||
| 12 | Al5 | DI-13 | ||
| 11 | Al6/DOWNLOAD | DI-14 | ||
| 9 | Pl1 | DI-15 | ||
| 23 | TX | DI-16 | ||
| 22 | RX | DI-17 | ||
| 24 | CAN-L | DI-18 | ||
| 25 | CAN-H | DI-19 | ||
| 26 | GND |
Port Description
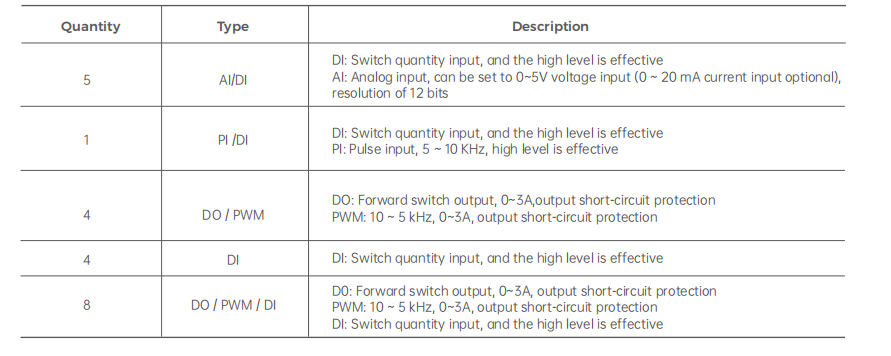
Electrical Interface

Outline Dimension
Typical Application